The Weed Manager’s Guide To Remote Detection
The Weed Manager’s Guide To Remote Detection
Planning the flight mission for UAV weed detection missions is a critical aspect that demands precise consideration. Given that these missions often unfold in remote and expansive locations, thorough planning becomes essential to guarantee the success of the operation.
The flight path needs to be strategically mapped to cover the targeted areas efficiently, considering factors such as terrain variability, vegetation density, and the potential presence of weeds. Additionally, the planning process must account for the extended duration of these missions, as remote detection may unfold over extended periods. This includes accounting for seasonal variations and ensuring that all necessary equipment is not only available at the site but also optimised for the specific conditions. Effective mission planning not only maximises the chances of successful weed detection but also helps mitigate potential challenges and uncertainties, enhancing the overall efficiency of the UAV operation.
In crafting a comprehensive flight mission plan for UAV weed detection, several key parameters need careful consideration to optimise data acquisition and analysis. The Altitude Above Ground Level (AGL) is a pivotal factor, influencing the Ground Sample Distance (GSD) or the pixel size of images captured. Striking the right balance between AGL and GSD is crucial to achieve the desired level of detail for effective weed detection.
Overlap between successive flight paths is another critical element, ensuring sufficient data coverage and redundancy for accurate analysis. Proper overlap minimises the chances of missing weed-infested areas and aids in creating a seamless mosaic of images for comprehensive mapping. The choice of flight speed is also pivotal, as it affects image quality and mission duration. Optimal speed ensures sharp imagery while covering the designated area within the available battery life. Factoring in the UAV's endurance and accounting for the need to navigate varying terrain conditions are vital aspects of speed determination. Additionally, considering the environmental conditions, such as wind speed and direction, is essential to maintain stability and accuracy during the mission.
In essence, a well-crafted flight mission plan for UAV weed detection integrates parameters like AGL, GSD, overlap, and speed, offering a systematic approach to gather high-quality data for precise weed mapping and analysis. This strategic planning not only enhances the efficiency of the detection process but also contributes to the overall success of the weed detection mission. Often, the planning software will limit the values you may use, but it is best to have an understanding of these limitations.
Effectively, AGL is a dependent variable of GSD, which in turn should be planned around the appearance of the weed of interest. More specifically, it should be planned around the size and shape of the characteristic features that distinguish it in the landscape. Typically, for a computer vision algorithm, it is very important to maintain the ability to reasonably distinguish such features.
Since the aspect of such features may vary due to lighting conditions, it is preferred to work with larger pixel count per feature for RGB cameras. This would be at least 8 pixels across for features with the aspect ratio nearing 1:1, or one or more pixels in width for long features. Multispectral or Hyperspectral sensors typically can be better calibrated to normalise the signal signature of such features, so less spatial resolution may be required. It is possible to consider adjusting these values to effectively distinguish the weed of interest from look-alike species or to ensure the imagery from the camera provides high colour and shape fidelity. The GSD is often provided as a ratio of flight height in the camera user manual. As such, the GSD can be calculated from equation 1 below, where Sw is the sensor width, Fr is the focal length (not 35mm equivalent) and Iw is the image width in pixels:

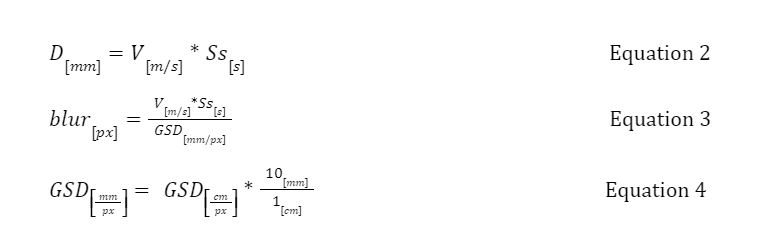
Similarly, area coverage, front-overlap and motion-induced blur are dependent variables of flight speed (Vm/s), which in turn is restricted by the minimum time interval between captures that the sensor is capable of performing. For example, the DJI Zenmuse P1 sensor can capture imagery at a maximum rate of 0.7 seconds per capture. It is recommended to avoid motion-induced blur to gather the best possible image quality and maintain consistency between captures. The motion-induced blur is a product of the displacement of the UAV during the capture, in relation to the target GSD. That is, if the displacement (D) (Equation 2) that occurs during the time that the camera takes capturing light with its shutter open (shutter speed or Ss) is greater than the planned length of a pixel (GSD), the light captured belonging to the ground that a pixel covers spills over neighbouring pixels, making the image blurry. In order to avoid this, the formulae below can be used to maintain such displacement below your planned GSD (Equation 3). It is recommended to aim for 0.5 pixels of displacement, but values of 1 might provide sufficient stability. One may also consider working in millimetres for simplicity (Equation 4 below).
Flight planning software can be used directly to plan flight parameters. However, there are tools available online that allow planning in advance, for example, Pix4D provides a simple spreadsheet that allows calculation of GSD based on camera parameters. Alternatively, a modified version can be used that allows the calculation of a few extra parameters. Bear in mind that the estimated time of flight should be taken as an under-estimation as it does not take into account take-off and landing, fly to and from starting/ending point, time at every turn, or wind effects. Pix4D GSD mod ZenmuseP1.
Regardless, it is best to test the parameters in flight planning software to ensure they can be used. Most software options tend to have safety limitations, such as minimum AGL when using terrain following features.
It is also important to ensure proper ground truthing is planned and executed if high overlap is used, as this will assist with de-duplicating imagery instances of the same plants, which may affect algorithms by over-training them on concrete samples.
Other links to information regarding flight height determination, flight considerations and differences in resolution (spatial, spectral and temporal) are provided by the team at GeoNadir: